Lesson 4: Data acquisition
Introduction: Electric drive systems are multi-physics devices that require capturing data across different domains for evaluating performance. This lesson will guide you through the intricacies of data acquisition in these systems.
Understanding Data Acquisition:
- Signals to Consider:
- Directly from the Unit Under Test (UUT).
- From testing environment’s devices.
- These signals help in evaluating results or tracing back problems.
- Commonly Measured Quantities:
- Voltage, current, torque, force, acceleration, acoustic noise.
- Speed, position, temperature, flow rate, pressure.
- Digital messages on the communication bus (e.g., CAN).
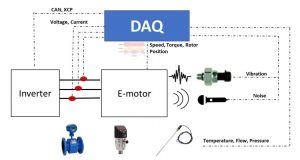
Figure Many types of signals from different sources are present during a measurement and must be measured simultaneously
Challenges in Data Acquisition:
- Collecting Concurrent Signals:
- The sheer number and variety of signals make simultaneous collection challenging.
- Signals can be analog low voltage or already digitalized by the sensor, requiring varied interfaces on the acquisition device.
- Often, recording is distributed across different modules or measuring cards.
- Time Synchronization:
- Ensuring signals share the same time-base is crucial for obtaining meaningful data.
- Without this, it’s tough to form a consecutive chain of events for analysis.
- Each signal or set of signals comes with a timestamp synchronized to a master device.
Achieving Precision in Data Acquisition:
- Accuracy: The system’s accuracy should be 10x better than the smallest deviation to be evaluated.
- Example: If the maximum allowed torque deviation is 2 [Nm], the system should resolve the signal in 0.2 [Nm] levels.
- Sampling Frequency:
- The Nyquist-Shannon theorem dictates that the sampling frequency should be at least double the frequency of the measured signal: 𝑓𝑠𝑎𝑚𝑝𝑙𝑖𝑛𝑔>2⋅𝑓𝑠𝑖𝑔𝑛𝑎𝑙
- In practical terms, often a frequency 10 times higher is used for sampling.
- If sampling frequency is less than double the signal’s frequency, aliasing occurs.
- Avoiding Aliasing:
- Measured signals go through a low-pass filter before digital sampling.
- This filter cuts off high frequency parts to prevent aliasing.
Conclusion: Data acquisition in electric drive systems is intricate. Understanding the challenges and the science behind accurate data capture is vital to obtain meaningful results and insights from tests.
Quiz:
- Why is time synchronization crucial in data acquisition?
- Explain the relationship between the sampling frequency and the signal’s frequency as per the Nyquist-Shannon theorem.
- What’s the purpose of using a low-pass filter before digital sampling?